Commande vectorielle de machines à l'aide de cartes DSP dSpace
Présentation :
Nous avons développé plusieurs programmes de commande vectorielle de machines asynchrones simple et double étoile.
Les machines simple étoile sont les machines classique de faible et moyenne puissance.
Les machines double étoile sont normalement des machines de forte puissance destinées à la segmentation de puissance ou pour apporter de la redondance à un système d'entraînemnt.
Nous avons impanté, sur DSP, des commandes vectorielles avec et sans capteur mécanique de vitesse, Indirect Rotor Field Orientation (IRFO), Direct Stator Field Orientation (DSFO), commande en V/f, commande BLDC pour machines synchrones trapézoïdales...
Présentation des cartes :
Nous présentons ici les cartes DSP dSpace DS1102 / DS1103 / DS1104
On peut les programmer en language C ou avec Matlab/Simulink et le RTW.
Les cartes "dSpace single boards" sont idéales pour les applications pédagogiques ou de recherche à budget limité puisqu'elles sont disponibles en ACE kit, c'est-à-dire en kit éducation à des prix très attractifs.
Elles disposent d'un DSP (Master) de calcul en virgule flottante et d'un DSP (Slave), en virgule fixe, qui s'occupe de la PWM et des entrées sorties numériques.
Elles intègrent, en ce qui nous concerne, des convertisseurs analogiques-numériques (ADC), numériques-analogiques, interfaces série, des timers…
La gamme est composée de :
Attention les cartes DS1102/1103 ne peuvent être placées que sur un bus ISA, vérifier alors la carte mère du PC hôte.
La carte DS1104 est de type PCI et s'intègre dans des PC plus récents. C'est le choix que l'on préconise pour ce type d'application.
Notion de DSP :
Un DSP est un processeur spécialisé dans le traitement de signal. Il intègre des périphériques comme un microcontrôleur (interface de communication Série (SPI, SCI), PWM, ADC...) mais il a la puissance de calcul d'un micro-processeur (multiplication).
Aujourd'hui, la frontière est floue entre DSP et microcontrôleur. Certain de ces derniers, notamment ceux dédiés au contrôle-commande, intègre un noyau DSP.
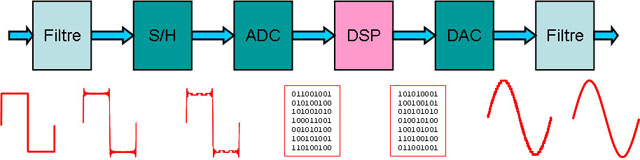
Voici l'exemple d'une chaîne de traitement numérique du signal. On distingue clairement, les composants d'acquisition (filtre, ADC (échantillonneur, convertisseur), de traitement (DSP) et de restitution (DAC, filtre).
Ce diagramme illustre le traitement d'un son par exemple.
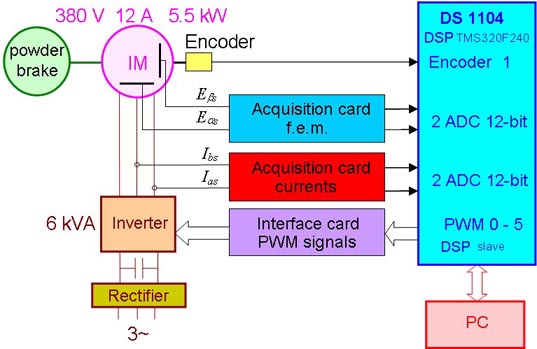
Notre but ici n'est pas de faire du traitement de son mais de commander un moteur. Il faut donc également disposer d'un onduleur pour appliquer les tensions aux phases de la machine et de cartes de mesure des courants et des tensions. On dispose également d'une charge permettant d'appliquer un couple résistant au couple électromagnétique généré par le moteur commandé.
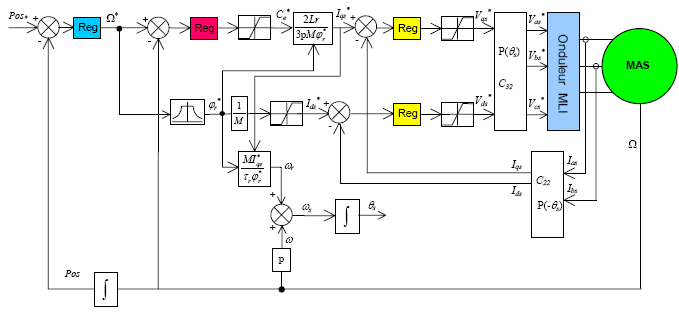
Commande vectorielle IRFO de la MAS, régulation des courants, de la vitesse et de la position
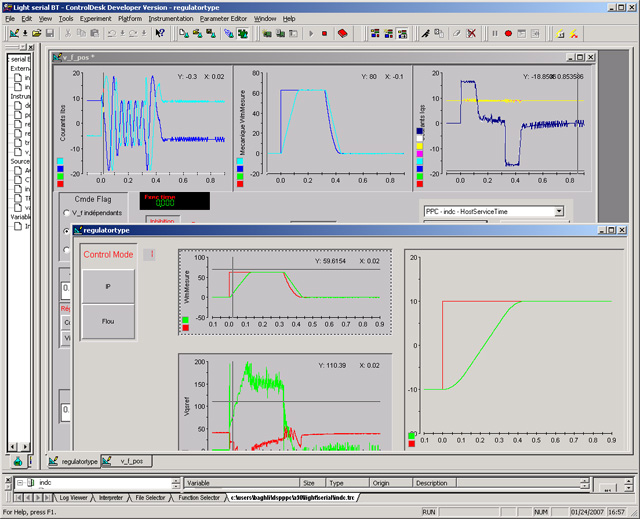
Capture écran de ControlDesk
Acquisition de signaux suite à un échelon de position de référence en régulation de position.
On distingue en bas à droite (position de référence : échelon en rouge, position réelle : courbe en vert).
En haut au milieu (vitesse de référence : bleu foncé, vitesse réelle : cyan). En haut à droite (courant Iqs ref : cyan, Iqs réel : bleu foncé, Ids ref : rouge, Ids réel : jaune).
On voit bien la qualité de la réponse sur un système avec 4 boucles de régulation (position, vitesse, Ids, Iqs).
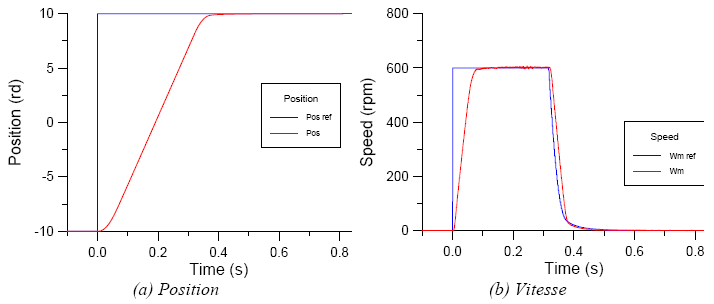
La position atteint la valeur de consigne sans dépassement et en douceur. Pour ce faire, le régulateur de position sort une consigne de vitesse qui atteint une valeur de palier de 600 tr/mn tant que le moteur se trouve loin de la position finale puis quand il s'en approche, le régulateur de position diminue progressivement la vitesse de référence.
Cette vitesse de référence change donc sans arrêt dans ce régime de poursuite et on voit bien que le régulateur de vitesse asservi la vitesse de la machine tout au long des changements de référence en imposant le couple maximal de la machine.
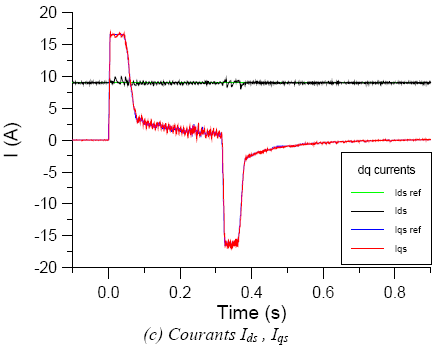
Le couple est représenté par le courant Iqs. Au début, la machine est en accélération maximale Iqs=16.5 A, puis quand elle atteint la vitesse de palier, le régulateur de vitesse diminue la consigne de courant. Ensuite, lorsque le régulateur veut freiner la machine, il passe le moteur en accélération négative à Iqs= –16.5 A, puis diminue afin que le positionnement se fasse sans dépassement.
Régulation de la position (a), de la vitesse (b) et des courants Ids et Iqs (c), lors d'un échelon de position de 20 rd avec un régulateur Flou.
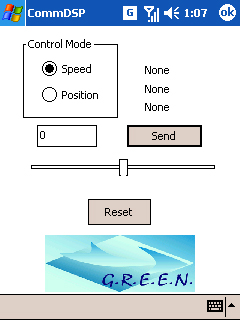
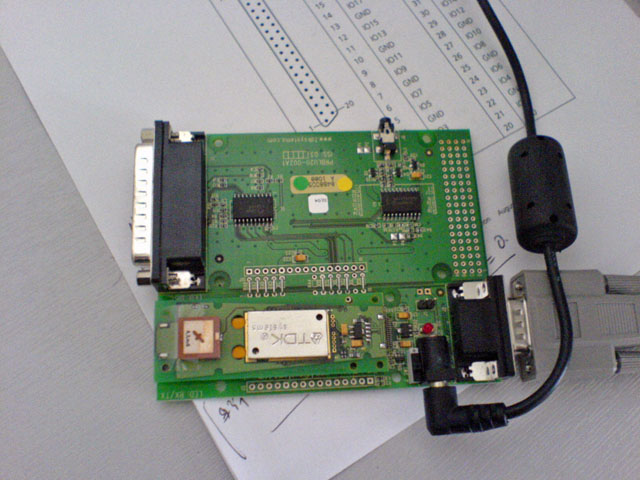
Commande à distance :
Nous avons également développé une commande à distance par liaison Bluetooth qui permet de prendre le contrôle sur les références de vitesse et de position de la commande précédente et ainsi, piloter à distance le moteur.
La commande peut se faire à l'aide d'un PC, d'un PocketPC ou d'un téléphone portable (Midlet JAVA). Article paru dans dSpace Magazine.

{kind=link}